|
|
| Forum Archaeologiae - Zeitschrift für klassische Archäologie 34 / III / 2005 |
Using the rotational axis, the profile line is estimated along this axis. To get the longest profile line, which gives the maximum of information about a sherd, the profile line is estimated where the sherd has its maximum height. For sherds with a complex breakage it is also possible to use multiple profile lines to get the virtual longest profile line.
Furthermore the Technical University of Vienna is currently preparing an Audio-Visual-Laboratory (AVLab) with focus on applications in cultural heritage. The equipment consists of a 3D-Scanner, different illuminations and digital cameras for high-resolution, infrared and ultra-violet photography. The AVLab will be a general contact point for development and application in cultural heritage in Austria. International interested parties are also welcome.
Introduction
Ceramics are one of the most widespread archaeological finds and are a short-lived material. This property helps researchers to document changes of style and ornaments. In particular ceramic vessels, where shape and decoration are exposed to constantly changing fashion, not only allow a basis for dating the archaeological strata, but also provide evidence of local production and trade relations of a community as well as the consumer behavior of the local population [OTV93].
The traditional method of documentation of fragments is a drawing of the profile line (Fig. 1a, b), which is an intersection of the fragment along the axis of symmetry (also called rotational axis, Fig. 1c), which can be found for fragments manufactured on rotational plates [YM97]. Finding this axis of rotation and drawing the profile line by hand requires expert knowledge and a certain amount of time.
Therefore we are developing a fully automated system for acquisition and documentation of profile lines using a 3D scanner based on structured light [KS03, MSKS04]. The range- and pictorial information of a pottery fragment recorded by the 3D scanner serves as the basis for the classification and reconstruction process.

Data Acquisition
Tools for archaeological documentation have to fulfill the criteria of performance (findings/hour), accuracy, robustness, transportability, overall costs and careful handling of the findings. Industrial systems for data acquisition for reverse engineering have similar requirements and so several 3D scanning techniques for different application were developed in recent research projects. We participated in two of these projects, which were the 3D-MURALE (EU IST-1999-20273) and "Computer Aided Classification of Ceramics" (FWF P13385-INF).
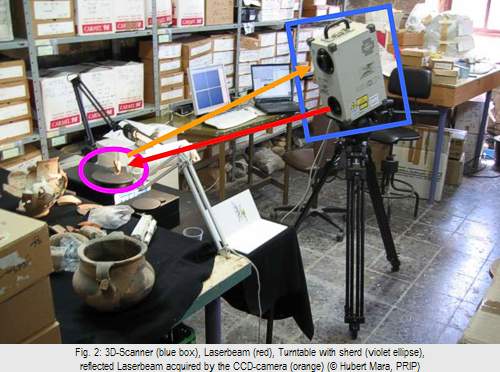
Our task during these two projects was the development of a suitable acquisition system and a system for processing and documentation of fragments of ceramics (shortly called sherds). As sherds are small objects, we used a short-range 3D scanner based on CCD-camera and a laser. The principle of this 3D scanner is triangulation (this principle is also shown in [KL98]). As the relative position between the camera and the laser is known, the projection of the laser on an object, which is acquired by the camera, is used to estimate the distance from the camera to the object. For faster acquisition the laser-beam is split into a laser-plane by the use of a prism. Hence the camera acquires an image of the line of intersection between the laser-plane and an object. For each pixel of the image of this line the distance (range) is estimated. To acquire more than a few points of the surface of an object, the laser is rotated, so the intersecting line moves over the object. A series of images is acquired (scanning) and therefore estimate the surface.
The 3D scanner used for our latest research is the Minolta VIVID-900 of the "Innovative Project 3D-Technologies" of the Vienna University of Technology (Fig. 2). Such 3D Scanners use a CCD-camera and a laser, which operate at a range of approximately 0.7-1.5m. Therefore objects of medium size with a maximum side-length between 1cm and 100cm can be acquired with a resolution, measured between two points of the surface, of 0.1mm up to 0.5mm, depending on the size of the object. For large and small objects other 3D scanners using different techniques (e.g. time of flight) exist, which are rather expensive and not suitable for documentation of small findings like sherds.
Data Processing
As sherds are thin objects, our system acquires one image of the inside of the sherd and a second image of the outside of the sherd. These two images are merged (registered) to get a complete 3D-model of a sherd. For rim fragments empirical experiments showed that a third image from the top of the sherd can give more detailed results. Our system also automatically removes other objects from the image, like the background and clamps for holding heavy objects.
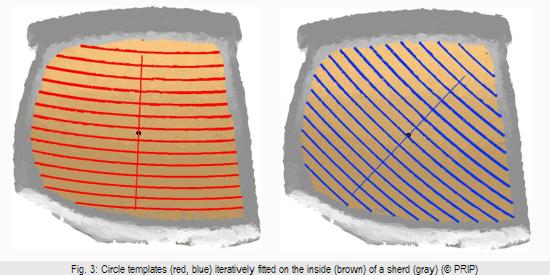
The next and most important step is the determination of the profile of the fragment in the so-called orientation step. The orientation of a sherd can be found from its rotational axis, which can be estimated for sherds from objects manufactured on rotational plates, which were used to manufacture most of the ceramics. The idea is similar to the manual method where archaeologists use circular templates to find concentric circles on sherds (Fig. 3), which are often present as rills on the inside of an object. Therefore our system virtually removes non-symmetric parts of the sherd, like the breakage or decorations. Afterwards the remaining, symmetric surface is iteratively searched for sets of concentric circles. For each set a score, describing how well the circles have been fitted, is estimated and so the axis with the best fit, which is the axis of rotation, is found.
Results
The first experiments using a Hough-inspired method [YM97] for estimation of the orientation of the sherds were done on 70 different sherds, which have been scanned in different positions up to 4 times for cross-validation of the results. These 70 sherds also contained small, bottom and decorated fragments. We could show that all sherds could be acquired and we could estimate the rotational axis for 49 sherds and hence could extract a correct profile for 70% of our data sets. The remaining 21 sherds (30%) were the small, flat and decorated sherds and sherds forming parts of the bottom of the vessel.
To improve our system so that we can process not only undecorated rim- and wall-fragments we introduced the method for fitting concentric circles. Experiments on 40 sherds, that could not be processed previously, have shown that we can process bottom-fragments and decorated fragments. Furthermore we could also process sherds of smaller size. So we could process 25 out of these 40 sherds.
To extensively test our system we cooperate with partners at archaeological institutes in Vienna and also international partners like the Catholic University of Leuven (3D-MURALE). Therefore we also visited the excavation in Sagalassos, Turkey (3D-MURALE) and Dor, Israel where we did experiments to compare traditional drawings, the profilograph and 3D scanning technologies.
The comparison and the in-situ performance evaluation showed that the manual drawings and the profilograph have similar results. So we could process 4 to 5 sherds per hour with manual drawings and for the profilograph. Using the 3D scanner we could achieve 20 sherds per hour for fine ware and 40 sherds per hour for coarse ware. We also estimated the time for each manual step used for handling the 3D scanner and the software. We could therefore propose enhancements to our system, which will result in an increased rate of 60-100 sherds per hour [HM05].
Furthermore the resolution of the 3D scanner is five times higher than the profilograph and we get a 3D model of the sherd including a mapped color image, which can be used for further analysis on painted sherds.
Outlook
There are sherds with paintings among the daily findings and the CCD-camera also acquires the paintings as mapped images on the 3D model. Therefore we made some preliminary experiments regarding the detection of painted lines on sherds. This work leads towards the detection of underdrawings of ceramics (e.g. red and black figures, Fig. 4-5). This method for the analysis of painted lines (brush strokes) has been adapted from our art historic project [PZS03].


The PRIP/AG3D-Group
The main research topic of the Pattern Recognition and Image Processing (PRIP) Group of the Vienna University of Technology is Computer Vision, which is typical a combination of low-level image acquisition and processing techniques and high-level analysis for image understanding, which are related to the research topic of Artificial Intelligence. As images are not necessarily two dimensional like regular photographs the working group (Arbeitsgruppe 3D - AG3D) has its research focus on 3D acquisition and analysis of 3D data. The AG3D is supervised by Robert Sablatnig and the project members with respect to cultural heritage are Paul Kammerer, Hubert Mara and Ernestine Zolda.
AG3D: http://www.prip.tuwien.ac.at/Research/3DVision/index.html
MURALE: http://www.prip.tuwien.ac.at/Research/Murale/index.html
Art History: http://www.prip.tuwien.ac.at/Research/ArtHistory/
Classification of ceramics: http://www.prip.tuwien.ac.at/Research/ArcheologicalSherds/index.html
References
[OTV93] C. Orton, P. Tyers, A. Vince. Pottery in Archaeology, Cambridge, 1993.
[KL96] M. Kampel and Ch. Liska, Keramik und Laser, Forum Archaeologiae 6/III/98.
[YM97] S. Ben-Yacoub, C. Menard, Robust Axis Determination for Rotational Symmetric Objects out of Range Data. In Burger W., Burge M., Editors, 21st Workshop of the OEAGM, pp.197-202, Hallstatt, Austria, May 1997.
[PZS03] P. Kammerer, E. Zolda, and R. Sablatnig, Computer aided analysis of underdrawings in infrared reflectograms. In In Proceedings of the 4th International Symposium on Virtual Reality, Archaeology and Intelligent Cultural Heritage, VAST03, 2003.
[KS03] M. Kampel and R. Sablatnig, Profile based pottery reconstruction. In D. Martin, editor, Proc. Of IEEE/CVPR Workshop on Applications of Computer Vision in Archaeology, CD-ROM, Madison, Wisconsin, USA, 2003.
[MSKS04] H. Mara, R. Sablatnig, A. Karasik, U. Smilansky, The Uniformity of Wheel Produced Pottery Deduced from 3D Image Processing and Scanning, in: W. Burger, J. Scharinger, (Eds.), Digital Imaging in Media and Education, Proc. of the 28th Workshop of the Austrian Association for Pattern Recognition (OAGM/AAPR), Schriftenreihe der OCG, Vol. 179, pp.197-204, 2004.
[HM05] H. Mara, Automated 3D-Scanning & Analysis of Archaeological Objects, Proc. of Modeling, Interface and Control (MIC/IASTED), Innsbruck, Austria, 2005.
![]() © Hubert Mara, Robert Sablatnig
© Hubert Mara, Robert Sablatnig
e-mail: mara@prip.tuwien.ac.at, sab@prip.tuwien.ac.at
This article should be cited like this: H. Mara - R. Sablatnig, 3D-Vision Applied in Archaeology, Forum Archaeologiae 34/III/2005 (http://farch.net).
